
로봇융합연구원, ‘공유제어 기반 장애인 협업 로보틱 워크셀’ 개발 추진
한국로봇융합연구원(KIRO, 원장 직무대행 정구봉)은 장애인과 로봇이 함께 협업할 수 있는 포용적 생산환경 조성을 위한 첨단 기술 개발에 본격 착수했다고 밝혔다.
해당 연구는 ‘공유제어 기반 장애인 협업 로보틱 워크셀 개발’이라는 과제로, 산업통상자원부의 지원을 받아 로봇자동화 전문기업 뉴로메카가 주관하고 있으며 한국로봇융합연구원과 한국전자기술연구원이 공동기관으로 참여하고 있다. 사업 기간은 2024년 4월부터 2026년 12월까지 3년 간이며, 총 39억 원의 국비가 투입된다.
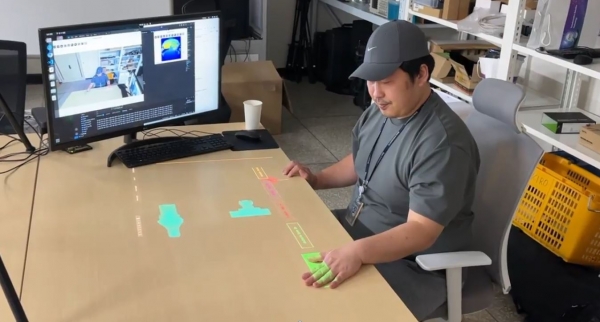 2차년도(2025년) 정보피드백 시스템 개발을 위해 ‘사용자 손 추정 위치를 활용한 프로젝션 UI 조작실험’을 하고 있다. (사진=로봇융합연구원)
2차년도(2025년) 정보피드백 시스템 개발을 위해 ‘사용자 손 추정 위치를 활용한 프로젝션 UI 조작실험’을 하고 있다. (사진=로봇융합연구원)우리 사회는 급속한 고령화와 생산가능 인구 감소라는 구조적 변화 속에 있다. 특히 중소 제조업체는 높은 작업 강도와 자동화의 어려움으로 인해 인력 확보에 어려움을 겪고 있다. 이에 KIRO는 장애인과 로봇이 자연스럽게 협업할 수 있는 스마트 작업 환경을 구축함으로써, 산업계의 인력난 해소와 함께 장애인을 포함한 취약계층의 새로운 일자리 창출이라는 두 가지 과제를 동시에 해결하고자 한다.
이번 연구에서 KIRO가 개발하는 기술은 다음과 같은 세 가지 핵심 요소로 구성된다. 자동화가 어려운 작업 공정에서 로봇과 장애인이 효율적으로 협업할 수 있도록 설계된 작업 공간인 ▲협동로봇 워크셀 설계 및 제작, 로봇 상태와 피드백을 사용자에게 직관적으로 전달하는 피드백 시스템인 ▲인간-로봇 상호작용(HRI)기술, 끝으로 장애인(사용자)의 행동과 의도를 실시간으로 인식하고 이에 따라 로봇의 움직임을 조정하는 공유제어 알고리즘인 ▲의도 인식 및 공유제어 기술을 개발하고 있다.
또한, KIRO는 구미에 위치한 국내 최대 로봇 전문 교육 인프라인 로봇직업혁신센터(RoTIC)를 통해, 개발 기술의 현장 검증과 직무 교육 프로그램 개발에도 집중할 계획이다. 연구 완료 후에는 RoTIC 내 테스트베드를 활용하여 장애인과 로봇 간 협업의 수용성을 검증하고, 워크셀 기반의 맞춤형 직무 교육 과정을 공동 개발 및 시범 운영함으로써 산업 현장과의 연계를 강화할 예정이다.
연구책임자인 정의정 책임연구원은 “이번 프로젝트는 지체장애나 지적장애 등 다양한 유형의 장애인의 사회 참여를 실현하는 실질적인 해법일 뿐만 아니라, 인구 구조 변화로 인한 사회적 문제에 대응하기 위한 사명감을 바탕으로 추진되고 있다”고 밝혔다.
정구봉 한국로봇융합연구원 부원장 역시 “이번 기술 개발은 장애인에 국한되지 않고, 향후 고령자, 외국인 근로자 등 다양한 계층으로 적용 범위를 확장할 수 있는 협업 기반 작업 환경의 미래 모델이 될 것”이라며 “기술을 통한 포용적 고용과 산업 경쟁력 강화라는 두 마리 토끼를 동시에 잡을 수 있을 것”이라고 밝혔다.
관련 뉴스




이야드 고객센터
경기 시흥시 마유로20번길 97